用語/定義(精度・単位など)
- 速度設定がppsなのでよくわからない
- KXL06150M-N2-FAをDS102ANRに接続して使おうとしています。最大速度を25mm/secで設定したいです。取扱説明書を読みましたが、速度設定がppsで書かれていて、今ひとつよくわかりません。どのように計算すれば良いでしょうか?
-
コントローラの分割数設定がFULLステップ(※)という前提でお答えします。
ppsとはpulse/sec(パルス・パー・セックと読みます)という意味です。
速度単位を[mm/sec]から[pulse/sec]に変換する必要があります。
KXL06150M-N2-FAの分解能(カタログ記載値)は 「4μm(FULL)」です。
つまり、1パルスあたり4μm移動することになります。
1[pulse] = 4[μm]
速度を分解能の単位[μm]に変換します。
(速度)= 25[mm/sec] = 25,000[μm/sec]
25,000μmの移動に必要なパルス数を求めます。
パルス数 = 25,000[μm] ÷ 4[μm/pulse] = 6,250[pulse]
25mm/secで設定する場合の速度は、「6,250pulse/sec」となります。
※FULLステ ップとは
モータの構造により決まる基本ステップ角であり、これをFULLステップと呼びます。5相ステッピングモーターでは一般的に0.72°となります。
基本ステップ角が0.36°のモータもあるため、モータの分解能からステージの分解能を算出する際は使用するモータの仕様を確認する必要があります。
FULLステップに対し、励磁方式、電流制御により1パルスあたりの移動角度を細分化する技術があります。
これらをHALFステップ、マイクロステップと呼び、HALFは基本ステップ角の半分(基本ステップ角度が0.72°の場合、1パルスあたり0.36°)、
マイクロステップに至っては基本ステップ角の1/250(基本ステップ角が 0.72°の場合、1パルスあたり0.00288°)まで分割可能です。
これにより、モータの分解能を小さくする⇒ステージの分解能を小さくする、ということが可能になります。
実際のステージ動作には摺動抵抗、弾性変形が介在します。そのためモータの分解能をあまり小さくしすぎてもステージ側の動作が必ずしも追従す る訳ではありませんのでご注意ください。一般に1/8~1/20分割までがステージの追従する限界となります。
- CW方向、CCW方向の意味
- 自動ステージの移動方向でCW方向、CCW方向とありますが、それぞれどのような意味でしょうか?
-
モータの回転方向でステージの移動方向を表します。
※モータの回転方向 = ステージテーブル側(モータのツマミとは反対側)から見たモータ軸の回転方向
◆CW(=ClockWise/時計回り)
ステージ上面がモータと反対側に動く方向です。
◆CCW(CounterClockWise/反時計回り)
ステージ上面が モータ側に動く方向です。
直動ステージ(XYステージ)、ゴニオステージは上記の通りとなります。
水平面Z軸ステージ、回転ステージの場合、ステージ上面テーブルの移動方向は以下のようになります。
<水平面Z軸ステージ>
CW方向 : ステージ上面が上がる方向
CCW方向 : ステージ上面 が下がる方向
<回転ステージの場合>
CW方向 : ステージ上面が時計回りに動く方向
CCW方向 : ステージ上面が反時計回りに動く方向
- 初速度・加減速時間・駆動速度
- 初速度(立ち上がり速度)、加減速時間、駆動速度、MAXスピードとは何ですか?
-
・初速度(起動速度) :ステージがスタートする際の速度設定となります。
・加減速時間 :起動速度より駆動速度に達する加速時間、駆動速度からステージが停止する迄の減速時間となります。
・駆動速度 :等速で駆動するスピードとなります。
・MAXスピード :ステージごとに設定された、設定でき る駆動速度の最高値となります。
- 分解能(自動ステージ)
- 分解能とは何ですか?
-
1パルスの信号を送ったときにステージが移動する量のことです。
- Fullステップ、Halfステップ、マイクロステップ
- 分解能の『FULL、HALF、マイクロステップ』とはどういう意味ですか?
-
1パルスに対するモータの電気的分解能となります。FULL:フルステップ HALF:ハーフステップ MS:マイクロステップとなり、この分割数によりステージの分解能が変わります。
◆HALF(ハーフステップ) ハーフステップ設定した場合、1パルスあたりの移動量はフルステップのときと比べて半分となります。
◆MS( マイクロステップ)
ハーフステップよりも更に細かい設定をすることができます。
分割数の設定は16パターンとなります。(1,2,2.5,4,5,8,10,20,25,40,50,80,100,125,200,250)
※但し、実際の追従性は製品により異なります。直動ステージで概ね1/20ぐらいの目安です。(保証対象外)
- ピッチング、ヨーイング、ローリング
- ピッチング・ヨーイング・ローリング(ピッチ・ヨー・ロール)とはどういう意味ですか?
-
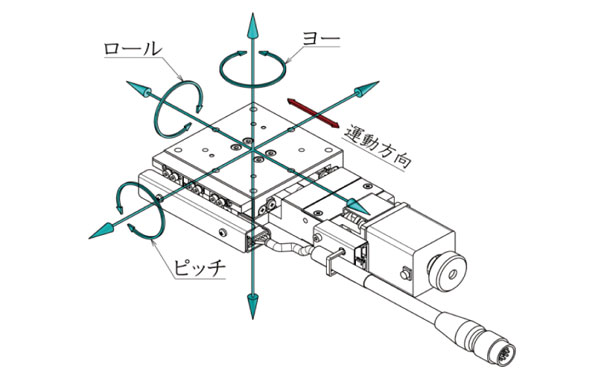
◆ピッチング :進行方向(前後)に対して垂直(左右)に交わる軸の軸回り運動
→上下の傾き
◆ヨーイング :進行方向(前後)に対して垂直(上下)に交わる軸の軸回り運動
→左右の傾き
◆ローリング :進行方向(前後)軸の軸回り運動
- 真直度、ピッチング、ヨーイング
- 真直度、ピッチング、ヨーイングの違いを教えてください
-
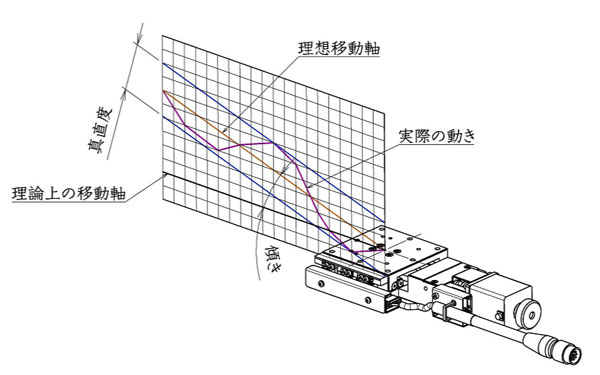
◆真直度[単位:μm]
・理想の移動軸に対して水平及び垂直方向の最大のズレ量(距離)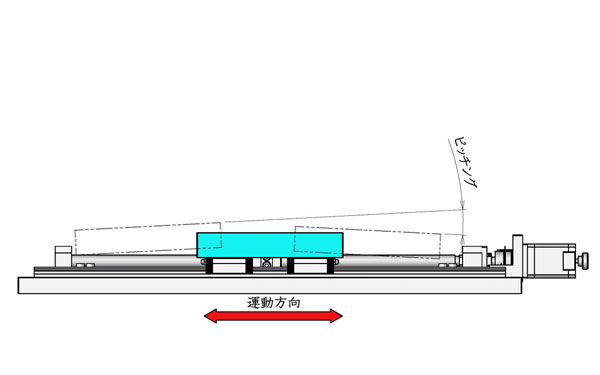
◆ピッチング[単位:″]
・縦の首振り方向の最大変位角度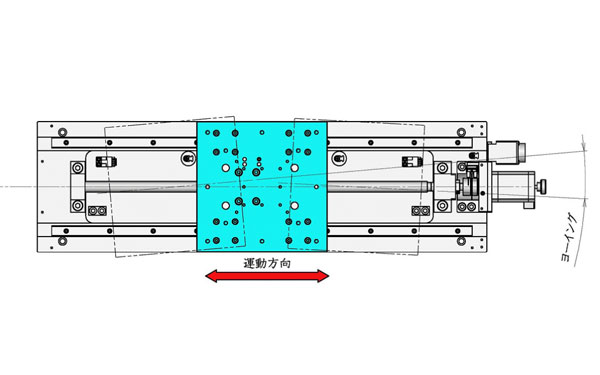
◆ヨーイング[単位:″]
・横の首振り方向の最大変位角度
- 【回転ステージ】偏芯量と面振れ量の違い
- 回転ステージの偏芯量と面振れ量の違いを教えてください
-
◆偏芯量[単位:μm]
・回転中心軸の水平方向変位量
◆面振れ量[単位:μm]
・テーブル上面のほぼ外周付近を測定点とし、1回転させたときの基準平面に対する変位の最大差
- 平行度と運動の平行度の違い
- 平行度と運動の平行度の違いを教えてください
-
◆平行度[単位:μm]
・基準平面上にステージを固定する。
・ステージの上面テーブルと基準平面がどの程度平行になっているかを示す数値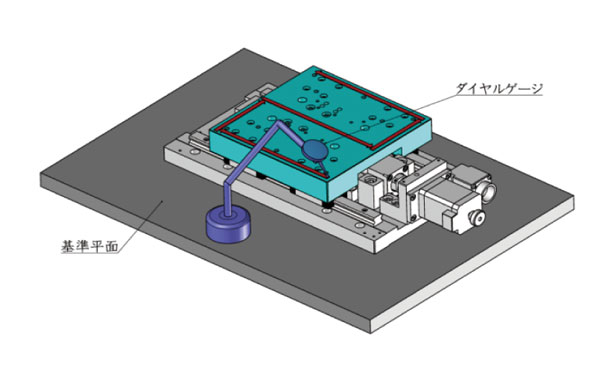
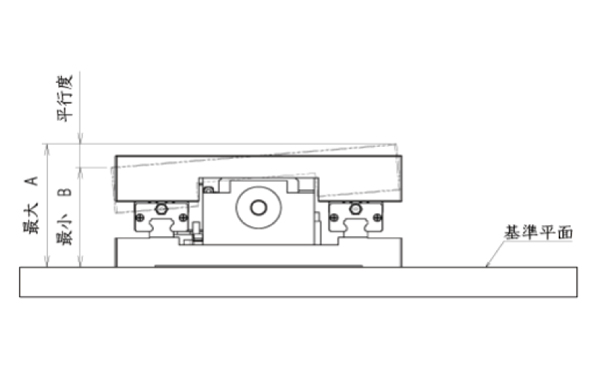
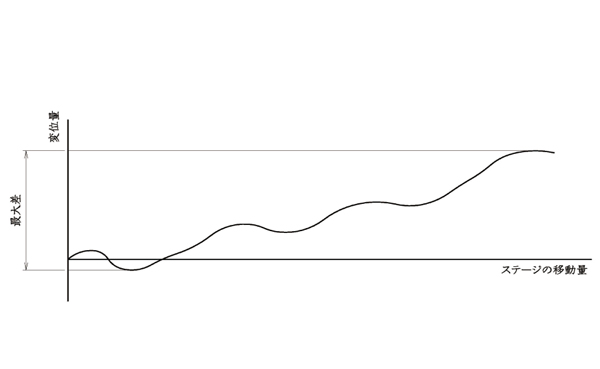
◆運動の平行度[単位:μm]
・基準平面上にステージを固定する。
・ステージの上面テーブルに基準平面との高さを測定する機器を置く。
・ステージを動かして計測した数値の最大差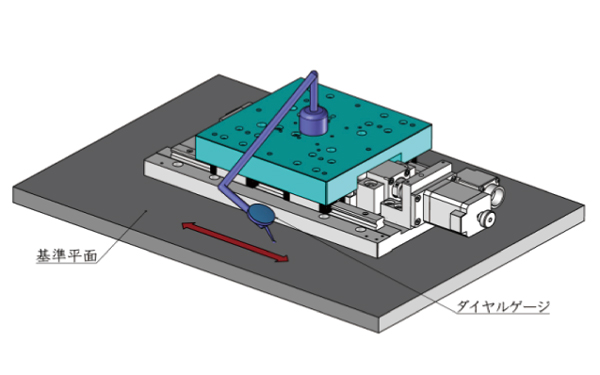
- 一方向位置決め精度、繰返し位置決め精度、ロストモーション
- 一方向位置決め精度、繰返し位置決め精度、ロストモーションの違いを教えてください
-
◆一方向位置決め精度[単位:μm]
「Point A⇒Bに変位量X移動させた時に、Point Bはどのくらい位置ズレの可能性があるのか?」を表した値。
(定義)
全ストロークの10分の1ずつを送り、10点を測定して各測定値の最大差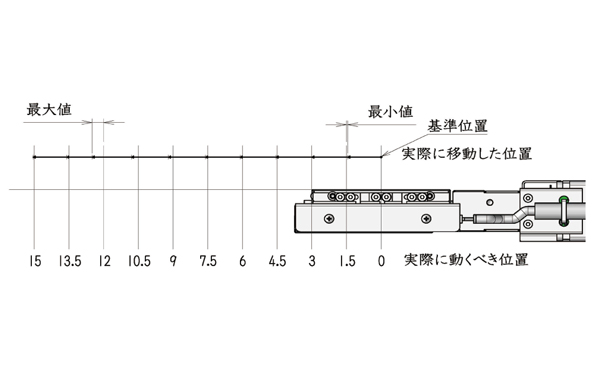
◆繰返し位置決め精度[単位:±μm]
同じところを行ったり来たりさせたいときに、どの程度の位置ズレがおきるか?」 を表した値。
(定義)
任意の1点に対して、同じ方向から位置決めを7回繰り返して、実際の停止位置とのズレを測定する。
測定したズレの最大差の2分の1を求める。
これをストロークの中央と両端の3点でおこなった際の一番大きな値。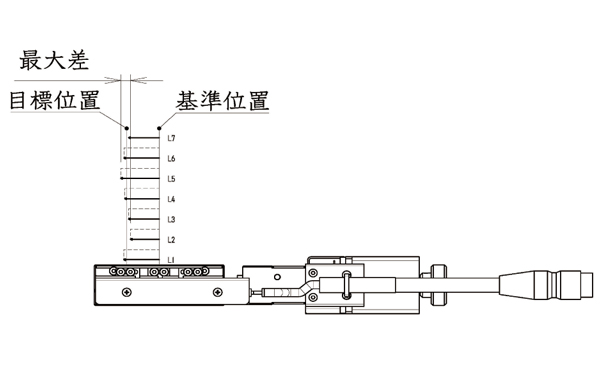
◆ロストモーション[単位:μm]
「行きと帰りで途中同じところに止まりたいときにどの程度位置ズレがおきるか?」を表した値。
(定義)
任意の1点(A点)に対して、B点から位置決めをおこなう。
このときの実際の停止位置をC点とする。(※正方向からの位置決め)
B点とは逆方向に移動させる。 ・・・ D点
D点からA点に対しての位置決めをおこなう。
このときの実際の停止位置をE点とする。(※負方向からの位置決め)
この測定を正負それぞれ7回繰り返し、「C点7回測定の平均」と「E点7回の測定の平均」の差を求める。
これをストローク中央と両端の3点でおこなった際の一番大きな値。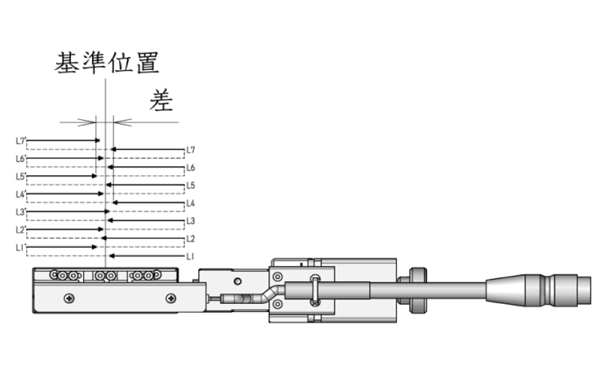
- モーメント剛性
- モーメント剛性とはどのような値ですか?
-
◆モーメント剛性[単位:″/N・cm]
ステージ上面に対し、ピッチ・ヨー・ロールそれぞれの方向にモーメント荷重を加える。
その際の1N・cmあたりの変位角のこと。
※ステージ移動面(上面)の中心からの距離を基準とする。
※カタログ記載のモーメント剛性値は代表実測値の表記となっている。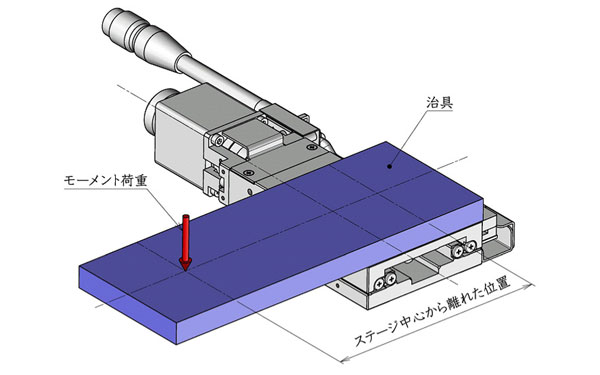
- サーボモータ仕様の分解能
- KXL06シリーズ(リード1mmタイプ)のサーボモータ仕様を検討しています。
この製品の最小分解能はいくつになりますでしょうか。 -
使用している三菱電機社製のACサーボモータ(コードUA 型式:HG-KR053の場合)は
22ビットエンコーダのタイプであり、モータ一回転(360度)で4194304分割することができます。
※4194304 P/R
ステージはモータ1回転で1mm(1000μm)移動する製品です。
したがって、『1000 μm/4194304≒0.0002384μm』が理論上の最小分解能となります。
※実際の追従性とは異なります。上記分解能での移動を保証するものではありません。
- 勝手違い(Rタイプ)とは?
- 勝手違い(Rタイプ)とはどのような向きになるのでしょうか。
-
自動ステージを鏡に映した向きとなります。
ケーブルコネクタ、リミットセンサ位置が反対側にきます。
- 加速度と加減速
- 加速度とはどのように求めればいいでしょうか。
加減速時間との関係も教えてください。 -
加速度とは、単位時間当たりの速度の変化率で、『m/sec^2(メートル パー セックセック』、『メートル毎秒毎秒』などで表します。
100msec(=0.1秒)後に10mm/secの速度となる場合の加速度は
10mm/sec÷100msec(=0.1秒) = 100mm/sec^2(0.1m/sec^2)となります。
※起動パルスを0(ゼロ)とした 場合